¿Que veremos en esta parte?
- Construyendo el desplazador
- Construyendo el cigüeñal
- Fabricando el soporte
- Uniéndolo todo
- Probando
- Una mejora
- Algunos problemas comunes
Construyendo el desplazador
El desplazador es la pieza que se mueve arriba y abajo siguiendo los diferentes ciclos del motor stirling. Estará fabricado en este caso de lana de acero, un producto usado para pulir o limpiar superficies. Se puede encontrar fácilmente en cualquier ferretería del mundo. Suelen venir en formato de un rollo plano.
Lo primero es tomar un
cañita y comenzar a envolverla con lana de acero de manera que se vaya formando un rollo de lana de acero a su alrededor, hay que apretar un poco para que quede algo compacta, seguimos hasta que tenga aproximadamente el grosor de una lata, tras lo cual cortamos el sobrante, con tijeras es suficiente:
 |
Hasta que tengamos el grosor de la lata
|
 |
| Enrollamos alrededor de una cañita |
Ahora medimos aproximadamente 5.1 cm y lo recortamos con cualquier herramienta para lograr que el rollo tenga esa altura aproximadamente:
 |
| 5.1 cm aproximadamente |
 |
| Recortamos |
Recortamos los bordes de la parte superior del rollo para que tomen una forma similar a la parte superior de la lata donde lo vamos a meter, de esta forma mejoraremos el movimiento del desplazador:
Tomamos un clip estirado y en un extremo lo doblamos para hacer un pequeño gancho, el gancho sera el final de un trozo recto de unos 5.1cm. A partir de final del trozo recto formaremos una espiral que abarque la mayor parte posible del diámetro del rollo de lana de acero:
 |
| 5.1cm a partir del gancho |
 |
| Mas o menos en espiral |
El gancho y el trozo de clip recto lo insertamos a través de la cañita por el centro del rollo de lana, hasta que el gancho sobresalga del rollo y la espiral sujete la mayor parte del rollo por debajo:
 |
| A través de la cañita |
 |
| El gancho sobresale un poco por encima |
Atamos al gancho un borde del hilo de nailon. Luego introducimos el rollo con cuidado en la lata inferior, la que aun conserva el fondo, por el agujero que hicimos al abrirla con el abrelatas. Presionando los laterales del rollo ira cediendo mientras entra en la lata:
 |
| Haciendo presión en los laterales y empujando hacia abajo |
Una vez dentro, comprobamos que se desplaza bien, subiéndolo y bajándolo tirando del nailon con la
mano:
 |
| Asegurarse que sube y baja fácilmente |
Si todo ha ido bien ya tenemos el desplazador en la lata. Ahora queda sacar el hilo de nailon a través del diafragma, cogemos el extremo del hilo del desplazador por el lado contrario al gancho, sacamos la chincheta del diafragma, con cuidado para que no se despeguen las tapas, e introducimos por el agujero de la chincheta el borde del nailon, de manera que salga el extremo a través de la tapa entera que esta pegada en la superficie del globo:
Cubrimos con el globo la parte superior de la lata de forma que se mantenga sujeto por la presión, aunque no debe quedar muy rígido, ni muy hundido, y probamos nuevamente tirando del nailon que el desplazador se mueve correctamente dentro de la lata aun tirando de él a través del diafragma:
 |
| No debe quedar muy tenso que no pueda ceder, ni muy flojo que escape el aire por los bordes |
Si el desplazador se mueve bien, seria bueno retirar el globo un momento y ponerle una gota de pegamento al gancho para que este bien pegado al nailon y no se desate, luego volveremos a colocar el globo en la boca de la lata.
Ahora cogiendo una de las piezas metálicas que sacamos de las regletas, no es necesario que este taladrada, y retirando uno de los tornillos que trae, anudaremos el extremo del nailon al agujero que deja el tornillo. Por el otro introducimos un trozo de alambre/clip recto y atornillamos fuerte:
Esta pieza ayudara a que no se nos escurra el hilo dentro de la lata y cuando lo unamos nos sera útil para calibrar la longitud correcta del nailon.
Bueno ya casi esta terminado el cilindro del motor, de momento lo dejamos aparcado para comenzar con...
El cigüeñal
Es un poco difícil ver la configuración tridimensional del cigüeñal en una imagen, pero vamos a intentarlo. Esta parte móvil es la que llevara gran carga sobre el funcionamiento final del motor, vamos a necesitar un clip de mariposa, que son algo mas gruesos o un alambre mas gordo, tres piezas de las que extrajimos de las regletas eléctricas y taladramos, unos alicates preferentemente finos y algo con lo que medir nos vendría bien también.
Tomamos el clip/alambre recto y aproximadamente por la mitad doblamos uno de sus lados 90º y dejando unos 10mm de espacio doblamos 45º al otro lado. Creando así, un pequeño segmento central de 10mm y dos patas, una doblada 90º y la otra 45º. Por el lado de los 45º metemos una pieza eléctrica taladrada hasta que este en el segmento intermedio:
 |
| Asegurarse que gira fácilmente. |
Terminamos de doblar la pata de los 45º hasta que este paralela a la primera y la pieza metálica este encajonada en el pequeño segmento recto entre ambas patas:
Ahora doblamos las dos patas 90º hacia el frente del segmento de la pieza metálica, hasta que queden perpendiculares con el segmento recto, donde se encuentra la pieza metálica. Esta doblez debe estar a unos 20mm de la primera, no es especialmente importante, en uno de los dos motores lo hice a solo 5mm y también funciono:
Ahora estas nuevas patas que vienen hacia el frente las doblamos 90º contra la dirección, dejando como 5mm desde la anterior doblez:
 |
| De forma que queden paralelas al segmento donde se encuentra la pieza metálica |
Nuevamente dejando unos 10mm desde el anterior doblez, doblamos 45º hacia el fondo, dejando algo de angulo para colocar las otras dos piezas eléctricas en los segmentos rectos. Cuidado con el sentido en que se colocan las piezas metálicas, los tornillos de las tres deben mirar hacia el mismo lado al dejarlas colgar:
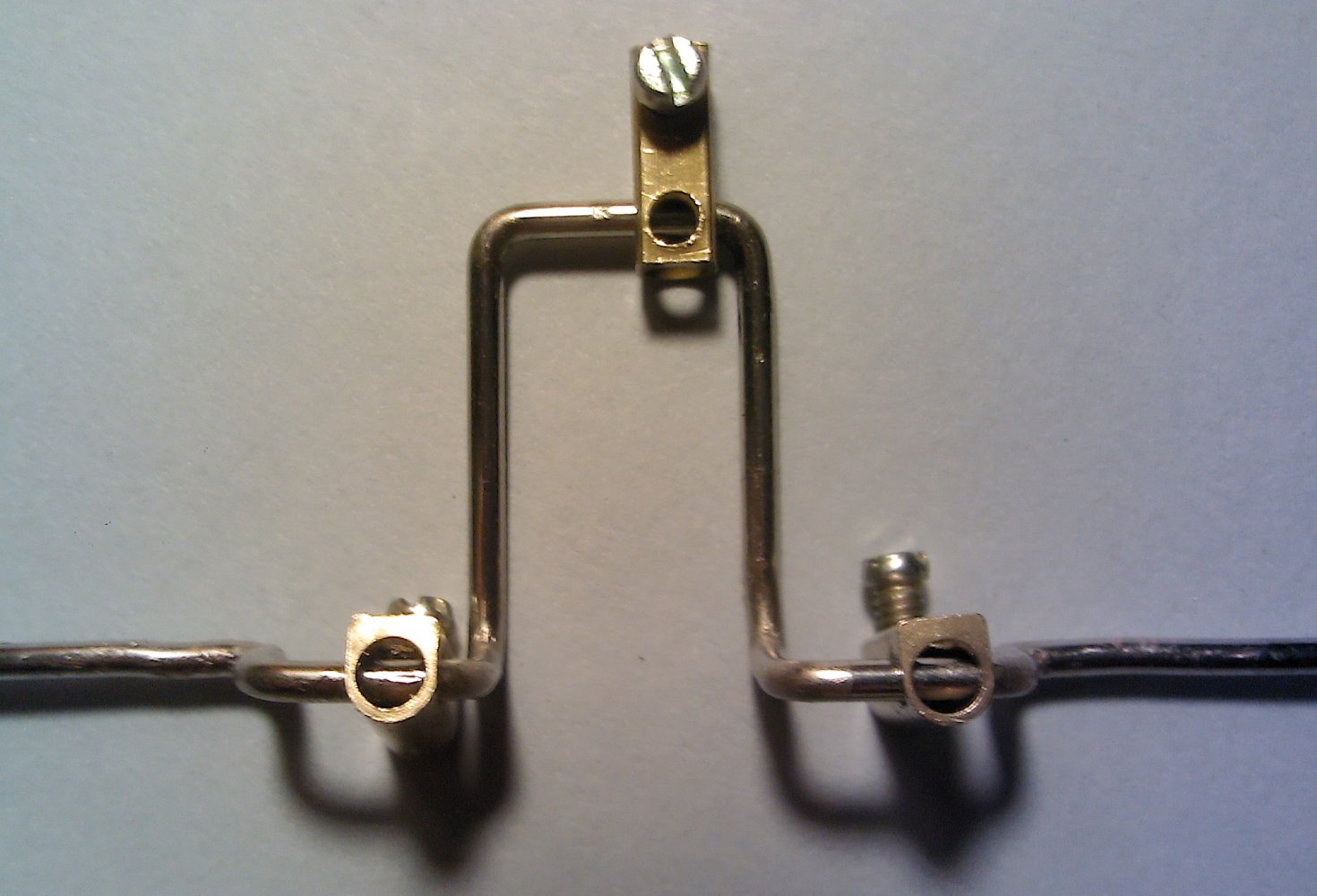
Una vez colocadas las otras dos piezas metálicas, terminamos de doblar hasta los 90º, hasta que las otras piezas no puedan escapar de sus respectivos segmentos y nos aseguramos que pueden girar libremente:
 |
| Los tornillos parecen estar en direcciones opuestas, pero eso es solo porque las piezas de abajo están apoyadas de pie, mientras que la central cuelga libremente. |
Volvemos a doblar las patas 90º hacia el frente de forma que quedan paralelas y a la misma altura que el primer segmento recto donde cuelga la primera pieza que colocamos:
Si habeis usado un clip entero quedara un cigüeñal un poco largo, habría que recortarlo para que midiese entre 10-12cm de forma que la pieza quepa atravesada en la lata superior a través de los agujeros. Uno de los dos lados debe ser mas larga para que podamos colocar el volante de inercia sobre ese eje.
Fabricando el soporte
El soporte solo tiene la misión de sujetar el motor sobre una o varias velas. Así que, si ves que es mas fácil usar otra cosa, no te cortes.
Use la lata de una ensalada para fabricar el soporte, sin muchas mediciones y mucha fuerza bruta:
 |
| La tapa de la lata se uso para fabricar el volante. |
Medimos en la lata aproximadamente el diametro de una lata de 33cl:
 |
| Casualmente esta lata tiene un circulo rojo que es casi del tamaño necesario |
Recortamos el fondo de la lata, en circulo aproximadamente del grosor de la lata, mejor si es un poco mas pequeño, pero solo un poco:
 |
| Poco a poco con un cuter |
Colocamos la lata atravesando el agujero, si no cabe o es demasiado ancho, ajustamos el borde ajustamdo el agujero con unos alicates para que la lata pueda atravesar lo, pero que quedando trabada:
 |
| Adaptar el borde con unos alicates para que la lata pueda sustentarse a través del agujero sin que caiga. |
Una vez la lata puede ser sustentada sobre el soporte, hay que abrir unas ventanas, para poder insertar las velas y que estas tengan suficiente oxigeno para arder:
 |
| Con un cuter cortamos en linea recta hacia abajo y repetimos unos 6cm otra, luego cortamos por arriba |
 |
| Luego cortamos por la parte de abajo para terminar la ventana |
Espacio sobrado para insertar una vela:
 |
| Con dos ventanas ya abiertas y una vela en su interior |
Unas cuatro ventanas de 6cm como a 2cm entre ellas:
Aspecto final con lata insertada:

La unión hace el trabajo
Es hora de unirlo todo. Cogemos la lata superior y metemos el cigueñal usando el agujero frontal. Ensartando uno de los pequeños agujeros laterales con uno de los extremos rectos del cigueñal, aprovechando el espacio creado para insertarlo por el otro:
Colocamos piezas metálicas, sin taladrar, para hacer de tope los lados del cigüeñal de forma que los pliegues queden centrados y tenga algo de margen para desplazarse:
 |
| Procurando que el pliegue central del cigüeñal que centrado en la lata. |
Ahora vamos a ajustar el tamaño y forma de las bielas para poder atornillar adecuadamente a las piezas del cigüeñal. En este caso las bielas son el clip que esta atravesado en la tapa pegada en el diafragma. Voy a poner fotos de un clip para que se vea la forma en que adopte el clip, aunque en las fotos para que se vea bien esta sin tapa. Partimos con el clip atravesando la tapa y formando aproximadamente 90º con la tapa:
 |
| Ejemplificaremos con un clip suelto |
 |
| El clip suelto representara al clip atravesado en la tapa |
Usando unos alicates pequeños, doblamos un poco las bielas hacia afuera de forma que tengan aproximadamente 45º, formando una V:
 |
| Esto estaría unido al diafragma, y a su vez insertado en la lata superior |
Nuevamente doblamos 45º hacia el interior de la lata, de forma que queda una especie de U:
 |
| Esto recorta el tamaño de las bielas |
Creamos otro segmento recto de otros 45º. De forma que queda algo así:
 |
| Siniestramente parecido al simbolo de Cerberus de Mass effect ehhh... |
Nuevamente otros 45º en un ultimo segmento de forma que quede recto hacia arriba. Quedando así:
En realidad la forma es poco relevante, lo importante es que cada segmento de bielas pueda entrar recto en las piezas metálicas. Es posible incluso recortar el clip, con unos alicates, si aun así queda demasiado largo. Tras esto debemos insertar la lata superior en la inferior:
Forzamos la posición mas baja posible de las piezas metálicas laterales y asegurando que las bielas entran en ellas, de forma recta y sin que roce el cigüeñal y atornillamos fuerte:
 |
| Asegurarse que las piezas metálicas estén en su posición mas baja y que el diafragma este deshinchado. |
Ahora tomamos la pieza metálica al extremo del nailon, que sobresale del diafragma, y metemos el pequeño trozo de alambre/clip que tiene atornillado a la pieza central del cigueñal y atornillamos fuerte:
Ajustamos el nudo de la pieza metálica para recortar el tamaño del nailon, de manera que cuando el cigueñal tiene la pieza central en su posición mas baja el desplazador se encuentra en el fondo de la lata inferior, mientras que es capaz de llegar a la posición superior del cigueñal y dar una vuelta sin quedarse bloqueado:
Lo atamos fuerte, si estamos seguros que la longitud es la correcto podemos ponerle una gota de pegamento.
Nos aseguramos manualmente que el desplazador sube y baja sin problemas. Le damos una o dos vueltas manualmente al cigueñal para asegurarnos que todo el conjunto gira apropiadamente y sin demasiado sobre esfuerzo.
Encajamos el motor en el soporte:
Esto le dará mas estabilidad al conjunto cuando le pongamos el volante del inercia:
 |
| Que quede espacio debajo para la/s velas |
Es el momento de atornillar el volante de inercia. Es sorprendente lo delicado que es todo el motor a la correcta colocación del volante, aun siendo un mecanismo tan aparentemente simple.
Localizamos el lado mas largo del cigüeñal que sobresale de la lata superior:
Insertamos el volante a través de la pieza metálica por el lado mas largo y atornillamos fuertemente, es importante que el volante no resbale:
Ponemos una gota de aceite de maquina en cada elemento que deba moverse, girar o desplazarse, especialmente en el hilo de nailon que atraviesa el diafragma:
 |
| Gota de aceite de maquina en cada elemento que pueda producir fricción |
 |
| Especialmente en el hilo de nailon |
Al girar el volante todo el mecanismo debería girar libremente al menos un par de veces, si no puede que le falte peso al volante o que este resbale, en este caso es bueno darle un poco de pegamento ciano para evitarlo. Si aun así es demasiado duro o no gira, revise la tensión del globo, que las bielas no rocen con el cigüeñal y vuelva a ajustar la longitud del nailon para el cigüeñal pueda girar completamente.
La prueba
En una zona sin peligro de incendios, encendemos una vela y la colocamos dentro del soporte de forma que la llama justo bajo la lata inferior:
 |
| Bien centrado, aunque no lo parezca. |
Este motor requiere un empujoncito para comenzar a funcionar, pero es necesario dejar un poco de tiempo para que se caliente, si intentas empujar o darle al volante antes no funcionara. Normalmente el globo por el calor y la presión del aire tiende a moverse un poco cuando ya esta suficientemente caliente, aunque no siempre pasa:
Al principio ira mas despacio, a medida que vaya calentadose aumentara su velocidad. Según el peso, el montaje, etc, quizás necesite algo mas de fuego para que vaya mas rapidito:
Una mejora
Si habéis visto el segundo vídeo de arriba, veréis que al aplicarle bastante calor con el mechero, el motor va mas rápido, una manera de conseguir ese mismo efecto sin aplicar mas calor es enfriar el extremo opuesto del cilindro. Para ello la idea es construir un pequeño recipiente para agua fría. Yo lo hice con un recipiente de flan desechable y soldadura plastica (Poxipol), pero hacerlo. Con una lata de atún da mas espacio para una mayor cantidad de agua. Recorte el fondo del recipiente con un cuter, lo inserte por la parte de abajo de la lata inferior. Colocando un circulo de soldadura plástica a la altura de donde debía permanecer el bote sin fugas, arrastre el recipiente hasta la parte mas alta de esta lata logrando que en su desplazamiento taponara con soldadura plástica todo posible escape de agua. Luego es cuestión de dejar que se endurezca y llenar con agua fría antes de encender el motor:
 |
El fondo del recipiente estaria taponado con la soldadura plastica
|
 |
| Al verter agua fría aumenta la diferencia de temperatura |
Algunos problemas comunes
- En ocasiones sucede que al aplicar calor al motor, el globo se hincha, incluso exageradamente y aun así el motor no gira, esto es porque la presión generada en el aire es demasiado y la lata esta magníficamente estanca, para solucionarlo lo mejor es crear una fuga artificial. Para ello introducimos un poco de nailon bajo el globo, de tal manera que una punta este dentro de la lata y la otra sobresalga por debajo del borde del globo. Esto normalmente creara una fuga lo suficientemente grande para solucionar el problema y que el motor funcione correctamente. Después de construir tres, me hizo en falta en uno, uno de tres es una probabilidad bastante grande.
- Al tratar de arrancar el motor, la tapa del diafragma se ladea, esto se soluciona usando una pieza de mayor superficie bajo el globo. Aunque normalmente si la enderezamos manualmente e insistimos este problema no evitara el funcionamiento del motor.
- Aunque las fotos del cigüeñal, los espacios paralelos en los que se colocan las piezas metálicas miden en torno a los 5mm, considero mas apropiado dejar 10mm, algo que facilita el giro sin problema de las piezas, es por eso que en la construcción del cigüeñal escribí 10mm en lugar de 5mm, aun así con 5mm también funciono.
Posts relacionados: